
1. ການນຳສະເໜີເຕັກໂນໂລຊີເຄື່ອງຈັກຖັກຮູບວົງມົນ
1. ການແນະນຳໂດຍຫຍໍ້ກ່ຽວກັບເຄື່ອງຖັກຮູບວົງມົນ
ເຄື່ອງຖັກຮູບວົງມົນ (ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 1) ເປັນອຸປະກອນທີ່ໃຊ້ທໍເສັ້ນດ້າຍຝ້າຍໃຫ້ເປັນຜ້າຮູບທໍ່. ສ່ວນໃຫຍ່ແມ່ນໃຊ້ເພື່ອຖັກຜ້າຖັກຫຼາຍປະເພດ, ຜ້າເສື້ອຍືດ, ຜ້າລວດລາຍຕ່າງໆທີ່ມີຮູ, ແລະອື່ນໆ. ອີງຕາມໂຄງສ້າງ, ມັນສາມາດແບ່ງອອກເປັນເຄື່ອງຖັກຮູບວົງມົນເສື້ອດ່ຽວ ແລະ ເຄື່ອງຖັກຮູບວົງມົນເສື້ອຄູ່, ເຊິ່ງຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນອຸດສາຫະກໍາສິ່ງທໍ.
 2. ຂໍ້ກຳນົດຂອງຂະບວນການ
2. ຂໍ້ກຳນົດຂອງຂະບວນການ
(1) ອິນເວີເຕີຕ້ອງມີຄວາມຕ້ານທານຕໍ່ສິ່ງແວດລ້ອມທີ່ເຂັ້ມແຂງ, ເພາະວ່າອຸນຫະພູມຂອງສະພາບແວດລ້ອມການເຮັດວຽກຢູ່ໃນສະຖານທີ່ແມ່ນຂ້ອນຂ້າງສູງ, ແລະຝ້າຍສາມາດເຮັດໃຫ້ພັດລົມລະບາຍຄວາມຮ້ອນຢຸດເຮັດວຽກແລະເສຍຫາຍໄດ້ງ່າຍ, ແລະຮູລະບາຍຄວາມຮ້ອນອຸດຕັນ.
(2) ຕ້ອງມີໜ້າທີ່ປະຕິບັດການໝຸນວຽນທີ່ມີຄວາມຍືດຫຍຸ່ນ. ປຸ່ມໝຸນວຽນຖືກຕິດຕັ້ງຢູ່ໃນຫຼາຍບ່ອນຂອງອຸປະກອນ, ແລະອິນເວີເຕີຕ້ອງຕອບສະໜອງຢ່າງວ່ອງໄວ.
(3) ມີສາມຄວາມໄວທີ່ຕ້ອງການໃນການຄວບຄຸມຄວາມໄວ. ໜຶ່ງແມ່ນຄວາມໄວໃນການດຳເນີນງານແບບ inching, ໂດຍປົກກະຕິແລ້ວປະມານ 6Hz; ອີກອັນໜຶ່ງແມ່ນຄວາມໄວໃນການທໍຜ້າປົກກະຕິ, ໂດຍມີຄວາມຖີ່ສູງສຸດເຖິງ 70Hz; ອັນທີສາມແມ່ນການດຳເນີນງານລວບລວມຄວາມໄວຕ່ຳ, ເຊິ່ງຕ້ອງການຄວາມຖີ່ປະມານ 20Hz.
(4) ໃນລະຫວ່າງການໃຊ້ງານຂອງເຄື່ອງຖັກວົງມົນ, ຫ້າມບໍ່ໃຫ້ມີການປີ້ນກັບ ແລະ ໝຸນຂອງມໍເຕີຢ່າງເດັດຂາດ, ຖ້າບໍ່ດັ່ງນັ້ນເຂັມຂອງຕຽງເຂັມຈະງໍ ຫຼື ແຕກ. ຖ້າເຄື່ອງຖັກວົງມົນໃຊ້ແບຣິ່ງເຟສດຽວ, ສິ່ງນີ້ຈະບໍ່ຖືກພິຈາລະນາ. ຖ້າລະບົບໝຸນໄປຂ້າງໜ້າ ແລະ ຖອຍຫຼັງ ມັນຂຶ້ນກັບການໝຸນໄປຂ້າງໜ້າ ແລະ ຖອຍຫຼັງຂອງມໍເຕີຢ່າງສິ້ນເຊີງ. ໃນດ້ານໜຶ່ງ, ມັນຕ້ອງສາມາດຫ້າມການໝຸນກັບ, ແລະ ໃນທາງກົງກັນຂ້າມ, ມັນຕ້ອງຕັ້ງຄ່າການເບຣກ DC ເພື່ອກຳຈັດໝຸນ.
3. ຂໍ້ກຳນົດດ້ານປະສິດທິພາບ
ເມື່ອທໍຜ້າ, ນ້ຳໜັກຈະມີນ້ຳໜັກຫຼາຍ, ແລະຂະບວນການເລີ່ມ/ຄ່ອຍໆປ່ຽນຕ້ອງໄວ, ເຊິ່ງຮຽກຮ້ອງໃຫ້ອິນເວີເຕີມີຄວາມຖີ່ຕ່ຳ, ແຮງບິດໃຫຍ່, ແລະຄວາມໄວຕອບສະໜອງໄວ. ຕົວແປງຄວາມຖີ່ໃຊ້ໂໝດຄວບຄຸມເວັກເຕີເພື່ອປັບປຸງຄວາມຖືກຕ້ອງຂອງການສະຖຽນລະພາບຄວາມໄວຂອງມໍເຕີ ແລະ ຜົນຜະລິດແຮງບິດຄວາມຖີ່ຕ່ຳ.
4. ສາຍໄຟຄວບຄຸມ
ສ່ວນຄວບຄຸມຂອງເຄື່ອງຖັກແບບວົງມົນໃຊ້ໄມໂຄຣຄອນໂທຣລເລີ ຫຼື PLC + ການຄວບຄຸມການໂຕ້ຕອບລະຫວ່າງມະນຸດກັບເຄື່ອງຈັກ. ຕົວແປງຄວາມຖີ່ຖືກຄວບຄຸມໂດຍຂົ້ວເພື່ອເລີ່ມຕົ້ນ ແລະ ຢຸດ, ແລະຄວາມຖີ່ແມ່ນໃຫ້ໂດຍປະລິມານອະນາລັອກ ຫຼື ການຕັ້ງຄ່າຄວາມຖີ່ຫຼາຍຂັ້ນຕອນ.
ໂດຍພື້ນຖານແລ້ວມີສອງຮູບແບບການຄວບຄຸມສຳລັບການຄວບຄຸມຫຼາຍຄວາມໄວ. ອັນໜຶ່ງແມ່ນການໃຊ້ແບບອະນາລັອກເພື່ອຕັ້ງຄ່າຄວາມຖີ່. ບໍ່ວ່າຈະເປັນການເຮັດວຽກແບບ jogging ຫຼື ການເຮັດວຽກຄວາມໄວສູງ ແລະ ຄວາມໄວຕ່ຳ, ສັນຍານອະນາລັອກ ແລະ ຄຳແນະນຳໃນການເຮັດວຽກແມ່ນໃຫ້ໂດຍລະບົບຄວບຄຸມ; ອີກອັນໜຶ່ງແມ່ນການໃຊ້ຕົວແປງຄວາມຖີ່. ການຕັ້ງຄ່າຄວາມຖີ່ຫຼາຍຂັ້ນຕອນໃນຕົວ, ລະບົບຄວບຄຸມໃຫ້ສັນຍານສະຫຼັບຄວາມຖີ່ຫຼາຍຂັ້ນຕອນ, jog ແມ່ນໃຫ້ໂດຍຕົວອິນເວີເຕີເອງ, ແລະ ຄວາມຖີ່ການທໍຄວາມໄວສູງແມ່ນໃຫ້ໂດຍການຕັ້ງຄ່າປະລິມານອະນາລັອກ ຫຼື ດິຈິຕອນຂອງອິນເວີເຕີ.
2. ຄວາມຕ້ອງການໃນສະຖານທີ່ ແລະ ແຜນການມອບໝາຍ
(1) ຂໍ້ກຳນົດໃນສະຖານທີ່
ອຸດສາຫະກຳເຄື່ອງຈັກຖັກວົງມົນມີຄວາມຕ້ອງການທີ່ຂ້ອນຂ້າງງ່າຍດາຍສຳລັບໜ້າທີ່ຄວບຄຸມຂອງອິນເວີເຕີ. ໂດຍທົ່ວໄປ, ມັນຖືກເຊື່ອມຕໍ່ກັບຂົ້ວຕໍ່ເພື່ອຄວບຄຸມການເລີ່ມຕົ້ນ ແລະ ຢຸດ, ຄວາມຖີ່ອະນາລັອກຖືກກຳນົດ, ຫຼື ຄວາມໄວຫຼາຍຄັ້ງຖືກໃຊ້ເພື່ອຕັ້ງຄວາມຖີ່. ການເຮັດວຽກແບບ inching ຫຼື ຄວາມໄວຕ່ຳແມ່ນຕ້ອງການຄວາມໄວ, ສະນັ້ນອິນເວີເຕີຈຶ່ງຖືກກຳນົດເພື່ອຄວບຄຸມມໍເຕີເພື່ອສ້າງແຮງບິດຄວາມຖີ່ຕ່ຳຂະໜາດໃຫຍ່ທີ່ຄວາມຖີ່ຕ່ຳ. ໂດຍທົ່ວໄປ, ໃນການນຳໃຊ້ເຄື່ອງຈັກຖັກວົງມົນ, ໂໝດ V/F ຂອງຕົວແປງຄວາມຖີ່ແມ່ນພຽງພໍ.
(2) ແຜນການແກ້ໄຂບັນຫາ ແຜນການທີ່ພວກເຮົາຮັບຮອງເອົາແມ່ນ: ຕົວແປງໄຟຟ້າເວັກເຕີກະແສໄຟຟ້າແບບບໍ່ມີເຊັນເຊີຊຸດ C320 ພະລັງງານ: 3.7 ແລະ 5.5KW
3. ພາລາມິເຕີ ແລະ ຄຳແນະນຳກ່ຽວກັບການແກ້ໄຂຂໍ້ຜິດພາດ
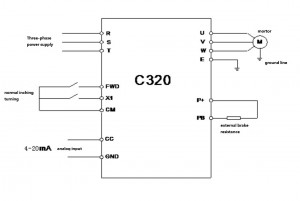
1. ແຜນວາດສາຍໄຟ
2. ການຕັ້ງຄ່າພາລາມິເຕີແກ້ໄຂຂໍ້ຜິດພາດ
(1) F0.0=0 ຮູບແບບ VF
(2) F0.1=6 ຄວາມຖີ່ຂອງຊ່ອງສັນຍານກະແສໄຟຟ້າພາຍນອກ
(3) F0.4=0001 ການຄວບຄຸມເຄື່ອງຕໍ່ພາຍນອກ
(4) F0.6=0010 ການປ້ອງກັນການໝູນຖອຍຫຼັງແມ່ນຖືກຕ້ອງ
(5) F0.10=5 ເວລາເລັ່ງ 5S
(6) F0.11=0.8 ເວລາຊະລໍຕົວ 0.8S
(7) F0.16=6 ຄວາມຖີ່ຂອງພາຫະນະ 6K
(8) F1.1=4 ແຮງບິດເພີ່ມ 4
(9) F3.0=6 ຕັ້ງ X1 ໃຫ້ເຄື່ອນທີ່ໄປຂ້າງໜ້າ
(10) F4.10=6 ຕັ້ງຄ່າຄວາມຖີ່ຂອງ jog ເປັນ 6HZ
(11) F4.21=3.5 ຕັ້ງຄ່າເວລາເລັ່ງການແລ່ນ jog ເປັນ 3.5S
(12) F4.22=1.5 ກຳນົດເວລາຫຼຸດຄວາມໄວຂອງການເຄື່ອນໄຫວເປັນ 1.5S
ບັນທຶກການດີບັກ
(1) ກ່ອນອື່ນໝົດ, ໃຫ້ແລ່ນເພື່ອກຳນົດທິດທາງຂອງມໍເຕີ.
(2) ກ່ຽວກັບບັນຫາການສັ່ນສະເທືອນ ແລະ ການຕອບສະໜອງຊ້າໃນລະຫວ່າງການແລ່ນ, ເວລາເລັ່ງ ແລະ ຫຼຸດຄວາມໄວຂອງການແລ່ນຕ້ອງໄດ້ຮັບການປັບຕາມຄວາມຕ້ອງການ.
(3) ແຮງບິດຄວາມຖີ່ຕ່ຳສາມາດປັບປຸງໄດ້ໂດຍການປັບຄື້ນພາຫະນະ ແລະ ການເພີ່ມແຮງບິດ.
(4) ຝ້າຍອຸດຕັນທໍ່ລະບາຍອາກາດ ແລະ ພັດລົມຢຸດເຮັດວຽກ, ເຮັດໃຫ້ການລະບາຍຄວາມຮ້ອນຂອງອິນເວີເຕີບໍ່ດີ. ສະຖານະການນີ້ເກີດຂຶ້ນເລື້ອຍໆ. ໃນປະຈຸບັນ, ອິນເວີເຕີທົ່ວໄປຈະຂ້າມສັນຍານເຕືອນຄວາມຮ້ອນ ແລະ ຈາກນັ້ນຈະເອົາຜ້າຝ້າຍອອກຈາກທໍ່ລະບາຍອາກາດດ້ວຍຕົນເອງກ່ອນທີ່ຈະສືບຕໍ່ໃຊ້ງານ.
ເວລາໂພສ: ກັນຍາ-08-2023